




Ukázka funkce prvního prototypu soft-robotického chapadla při uchopení vařené brokolice
Lidská ruka jako nedostižný vzor
Jedním z cílů celosvětového výzkumu v oblasti robotické manipulace je nalezení koncepce robotického chapadla, která bude dostatečně univerzální a umožní pracovat s širokým spektrem manipulovaných objektů. Takové chapadlo by mělo umožnit uchopit nejen objekty různých tvarů a velikostí, ale také objekty tvarově flexibilní nebo křehké. Jedním z ideálů je přitom lidská ruka, která umožňuje jak velmi jemné uchopení křehkých těles, tak velmi pevný stisk a manipulaci s tělesy o velké hmotnosti.
Využití měkkých a poddajných materiálů v konstrukci soft-robotických chapadel představuje jednu z nejperspektivnějších možností, jak tento problém řešit. V posledních letech tak vznikla široká škála prototypů, které nejčastěji využívají deformaci měkkých polymerních struktur, nezřídka inspirovaných tvarem a funkcí různých živočichů (některé prototypy ukazuje například video Soft Robots vydané časopisem Nature). Výhodou těchto chapadel je vysoká flexibilita, citlivost a biokompatibilita. Zásadním problémem je však stále nízká dynamika, omezený rozsah síly stisku a nízká odolnost vůči vnějšímu poškození.
Základem je magnetický funkční materiál
Koncept soft-robotických chapadel ovládaných magnetickým polem vznikl na Západočeské univerzitě v rámci základního výzkumu magnetoreologických elastomerů (MRE), tedy materiálu, který tvoří jejich klíčové části. MRE je kompozit tvořený magnetickými mikročásticemi rozmístěnými v matrici elastomeru. Jedná se o vysoce elastický a zároveň magneticky aktivní materiál. Působením magnetického pole generovaného ovládacím elektromagnetem vzniká síla v celém jeho objemu a lze tak dosáhnout výrazného stisku chapadla. Při jeho porušení ale zároveň nedochází ke ztrátě základní funkce, a to umožňuje konstruovat velmi odolná, a přitom stále flexibilní chapadla. Mezi další unikátní vlastnosti materiálu pak patří také rychlost jeho reakce a možnost výroby těles rozličných tvarů omezených snad jen naší představivostí.
V porovnání s konvenčními chapadly z tuhých materiálů tedy umožňují koncepty magnetických soft-chapadel flexibilní a adaptabilní uchopení manipulovaných objektů. Zároveň jsou však vyvíjená chapadla přímo ovládána elektromagnetickým polem, a to je jednou z největších výhod oproti moderním soft-robotickým chapadlům, nejčastěji ovládaným pneumaticky. U nových konceptů není nutné převádět elektrické signály na změny tlaku, které následně zajišťují potřebnou deformaci dílčích chapadel.
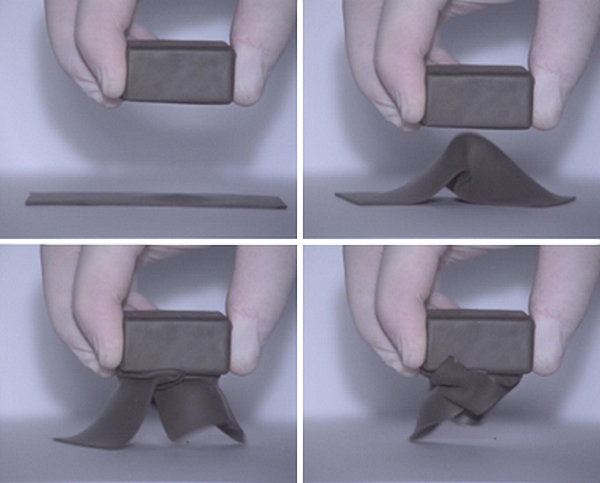
Ukázka reakce MRE na působení magnetického pole generovaného permanentním magnetem
Robotické chapadlo inspirované přírodou
V rámci výzkumu vyvinuli výzkumníci na Západočeské univerzitě několik funkčních prototypů soft-robotických úchopů, které jsou svou konstrukcí a principem funkce inspirovány nejen zmíněnou lidskou rukou, ale například také ptačím zobákem nebo kusadly mravenců. V laboratořích tak vznikají unikátní koncepty bionických soft-robotických chapadel, která představují funkční technologické demonstrátory, umožňující testování na reálných úlohách manipulace.
Originalita navržených konceptů soft-robotických chapadel tak leží především v použitém materiálu, know-how jeho syntézy, možnosti jeho přímého ovládání magnetickým polem, odolnosti a jednoduchosti. Mezi zamýšlené oblasti uplatnění pak patří například zemědělství, potravinářství, farmacie nebo medicína. Tyto oblasti jsou přitom důležité nejen s ohledem na nutnost univerzálního použití (flexibilní a adaptabilní uchopení), ale také s ohledem na možnost biokompatibilního provedení chapadla a velmi snadného čištění či jeho dezinfekce.
Matematický model, charakterizace materiálu a chování MRE v magnetickém poli jsou shrnuty v publikaci s názvem Magnetic Forces Behind Hyperelastic Behaviour of Magnetorheological Elastomers, který vyšla v odborném časopise IEEE Transactions on Magnetics. Základní myšlenky prvních zkoumaných konceptů byly prezentovány na konferenci RoboSoft 2019 a popisuje je příspěvek s názvem Magnetically Guided Soft Robotic Grippers.
Zapojení a motivace studentů
Výzkumu nových konceptů bionických chapadel a vývoji nových prototypů se pak v laboratořích věnují také studenti, a to nejen doktorandi a vysokoškolští studenti, ale také studenti středních škol v rámci svých odborných stáží nebo programu ScienceFEL na Fakultě elektrotechnické ZČU, ve kterém si mohou vyzkoušet práci v laboratořích a pracovat na reálných výzkumných úkolech. Své výsledky pak prezentují v rámci odborných soutěží, jako je například Středoškolská odborná činnost nebo Česká hlavička.
Hledá se aplikační partner
Aktuálně největší výzvou v rámci výzkumu bionických soft-robotických chapadel je integrace senzorů zajišťujících hmatovou odezvu, která umožní přesné řízení stisku chapadla. Cílem výzkumu přitom není osazení prototypu konvenčními senzory, ale o dosažení senzorické funkce samotného MRE. Hlavním cílem je tedy vytvořit takový funkční materiál, který bude možné deformovat pomocí magnetického pole a zároveň jeho deformaci určit z měření elektrických vlastností samotného materiálu.
Z hlediska vývoje nových prototypů je pak hlavním cílem výzkumného týmu nalezení aplikačního partnera z oblasti robotiky, který by pomohl s vývojem průmyslového prototypu a jeho testování v reálném provozu. Výsledky testů by následně umožnili výzkumníkům optimalizovat návrh jednotlivých prototypů a následně přenést výsledky výzkumu do praxe.
Autor: Martin Jambura, odbor Transfer a smluvní výzkum, Západočeská univerzita v Plzni
Tento článek vyšel v rámci seriálu Věda do praxe vznikajícího ve spolupráci s Centrem transferu technologií AV ČR a spolkem Transfera.cz, který je partnerem rubriky Transfer a spolupráce portálu Vědavýzkum.cz. Transfera.cz je jednotná funkční platforma hájící zájmy transferové komunity v ČR s cílem pracovat na posílení činností v oblasti transferu technologií a jejich rozvoji.
Transfer technologií je zjednodušeně přenos myšlenky, poznatku či vynálezu do praxe. Jde o dlouhou cestu, během které je nutné zajistit dostatečné financování, právní ochranu i správné komerční nasměrování původního nápadu. Bez profesionálního transferu technologií se komerčního úspěchu prakticky žádný vynález nedočká. I tak v praxi v Česku uspěje přibližně každý desátý projekt. Ročně zajišťuje transfer technologií české vědě prostředky v řádech miliard korun.
![]()
CETTAV (Centrum transferu technologií AV ČR) je specializované oddělení Střediska společných činností AV ČR. Poskytuje konzultace a služby všem pracovištím AV ČR v oblasti uplatňování výsledků výzkumu v praxi. Pomáhá vědeckým týmům s konkrétními případy komercializace výsledků, analýzou potenciálu praktického uplatnění, strategií ochrany duševního vlastnictví i smluvním zajištěním spoluprací s aplikačním sektorem. CETTAV vytvořil a stará se o obsah Portálu transferu AV ČR.
![]()

